
Các thử nghiệm xóc (rung động) hiện nay hướng tới những thử nghiệm với gia tốc, trọng tải thấp. Các điểm cộng hưởng trên bàn rung có gia tốc gấm hàng trăm lần so với gia tốc điều khiển, gây khó khăn cho việc xác định chất lượng sản phẩm. Để giải quyết những vấn đề này, chúng ta cần tìm hiểu về việc kiểm tra sản phẩm thử nghiệm nhỏ và xử lí thích ứng.
Nội dung
Các thử nghiệm xóc (rung động) hiện nay hướng tới những thử nghiệm với gia tốc, trọng tải thấp. Các điểm cộng hưởng trên bàn rung có gia tốc gấm hàng trăm lần so với gia tốc điều khiển, gây khó khăn cho việc xác định chất lượng sản phẩm. Để giải quyết những vấn đề này, chúng ta cần tìm hiểu về việc kiểm tra sản phẩm thử nghiệm nhỏ và xử lí thích ứng.
Thử nghiệm rung xóc sử dụng trong ngành công nghiệp điện tử, linh kiện nhỏ thường được thực hiện ở mức gia tốc < 1g. Máy thử nghiệm rung xóc có dải điều chỉnh gia tốc từ 0,1- 100g, nhưng chỉ sử dụng một phần nhỏ trong lĩnh vực này.
Các tín hiệu gia tốc phản hồi từ bàn rung nhỏ hơn nhiều so với tín hiệu gia tốc định mức của máy rung xóc. Bộ điều khiển rung xóc chuyển đổi tín hiệu gia tốc này thành tín hiệu số sử dụng bộ chuyển đổi ADC. Do tín hiệu phản hồi nhỏ, bộ ADC chuyển đổi tín hiệu với độ chính xác thấp.
Để cải thiện độ chính xác cho các thử nghiệm rung xóc tín hiệu nhỏ này ta sẽ sử dụng toàn bộ dải điều chỉnh bộ chuyển đổi ADC bằng cách sử dụng bộ khuyếch đại PGA. Ta sẽ khuyếch đại các tín hiệu gia tốc phản hồi nhỏ này lên tín hiệu vào định mức của bộ ADC.
Đặc điểm của PGA làcó thể được lập trình tự động bởi bộ điều khiển rung để phù hợp với các tín hiệu khác nhau của bài thử nghiệm. Bằng cách này, toàn bộ dải chuyển đổi của bộ ADC được sử dụng. Các thử nghiệm cho trọng tải nhỏ với tần số cộng hưởng lớn được kiểm soát đáng kể.
Chủ đề của bộ lọc tương tự đã là một chủ đề nghiên cứu từ những năm 1960. Sau đó, các bộ lọc này được sử dụng trong nhiều lĩnh vực, đặc biệt là trong truyền dữ liệu thông tin liên lạc như loại bỏ tiếng vọng, mã hóa giọng nói và cân bằng kênh.
Bộ lọc tương tự là phi tuyến và thay đổi liên tục theo thời gian dựa theo tín hiệu của đầu vào, đầu ra. Đặc tính tự điều chỉnh của các bộ lọc thích ứng làm cho chúng phù hợp để sử dụng trong các hệ thống vòng kín.
Việc thiết kế bộ điều khiểm cho máy thử rung xóc yêu cầu phải chọn một thuật toán phù hợp với việc xử lí tín hiệu dao động. Vì máy rung xóc cho ra tín hiệu phi tuyến và mẫu thử nghiệm sẽ khác nhau về kích thước,động lực học không xác định, do đó một thuật toán tương tự sẽ thích hợp cho việc điều khiển xử lí tín hiệu.
Bộ lọc thích ứng được lập trình để loại bỏ tín hiệu không mong muốn từ đó cải thiện tín hiệu đầu vào cho bộ điều khiển.
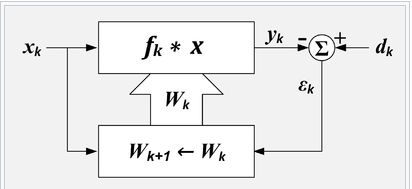
Tín hiệu đầu ra của bộ lọc được so sánh với giá trị tham chiếu để tạo ra giá trị chênh lệch, và nó là cơ sở để bộ lọc thay đổi trong số nhằm giảm thiểu tín hiệu chênh lệch. Như vậy ta sẽ có một tín hiệu gần đúng với giá trị đặt mong muốn của bài thử nghiệm rung xóc.
Các hàm điều chỉnh được sử dụng cho bộ lọc một cách phù hợp để đạt được hiệu quả điều chỉnh tối ưu.Việc lựa chọn các hàm này phụ thuộc vào thuật toán thích ứng, yêu cầu của từng bài thử nghiệm.
Lựa chọn bộ lọc có thể lập trình, đáp ứng xung hữu hạn (FIR) hoặc đáp ứng xung vô hạn (IIR).
Cấu trúc bộ lọc thích ứng.
Các thuật toán thích ứng.
FIR và IIR là hai bộ lọc thường dùng trong xử lý tín hiệu số. Chúng chỉ cấu tạo gồm vài phần tử, nhưng những phần tử này được kết hợp theo rất nhiều cách để tạo ra các bộ lọc phức tạp sử dụng trong xử lý tín hiệu số.
FIR là từ viết tắt Finite Impulse Response nghĩa là đáp ứng xung hữu hạn, trong khi IIR là Infinite Impulse Response, đáp ứng xung vô hạn. Mặc dù cả IIR và FIR đều phục vụ cùng mục đích, nhưng mỗi loại lại có những ưu nhược điểm riêng rất khác biệt sẽ được đề cập dưới đây.
Trong FIR, tín hiệu ra, sau khi tín hiệu vào được thiết lập từ non zero sang zero, chỉ có một số hữu hạn các phần tử tới đầu ra trước khi đầu ra chuyển sang zero. Sự lựa chọn bộ lọc sẽ đem tới kết quả vận hành khác biệt. Nhìn chung, cho mọi ứng dụng lọc, FIR đều thỏa mãn. Chúng đem tới sự chính xác theo cách tốt hơn và cũng rất mạnh mẽ (số lượng). Tuy nhiên, có vài trường hợp bộ lọc FIR trở thành quá lớn, ví dụ khi số lượng lớn hệ số lọc được dùng. Khi đó, chúng tốn kém về thời gian vận hành và khó thực hiện. Và đó là lúc IIR phát huy vai trò của mình.
Sự khác biệt lớn nhất chính là đáp ứng xung. Tuy nhiên, còn rất nhiều sự khác biệt khác ngoài nó. Với cùng tình huống lọc, FIR vận hành yêu cầu nhiều phép nhân và tổng hơn so với IIR. Nhưng các hệ thống máy tính lại thích hợp hơn cho FIR dẫn tới người dùng thích dùng FIR.
Bộ lọc FIR là không đệ quy trong khi IIR thì đệ quy. Do đó, trong FIR không có phản hồi feedback, còn trong IIR thì rất nhiều.
Bộ lọc IIR có thể được thiết kể để mô phỏng các đáp ứng lọc kiểu cổ điển, nhưng FIR không làm được. IIR khó đọc hơn so với FIR vì có phản hồi. Vậy tại sao lại dùng IIR thay vì FIR? Đơn giản là IIR có số lượng hệ số ít hơn so với FIR, do đó mà tốn ít thời gian thực hiện các phép toán hơn. Nhưng bộ lọc FIR lại dễ thiết kế hơn cho dù chúng cho đáp ứng phẳng. Sau nữa là về tính ổn định. Nếu được thiết kế đơn thuần, lọc IIR có thể không ổn định trong khi FIR thì luôn ổn định.
Vì những ưu điểm của nó bộ lọc FIR được sử dụng trong các hệ thống máy thử rung xóc.
Có bốn lớp cơ bản của cấu trúc lọc thích ứng: dự đoán, mô hình hóa hệ thống, mô hình hóa nghịch đảo và loại bỏ can thiệp.
Mỗi cấu trúc phù hợp với một loại ứng dụng nhất định và điều cần thiết là phải chọn cách triển khai chính xác để phù hợp với các yêu cầu hệ thống. Trong thử nghiệm rung xóc, điều quan trọng là đầu ra của máy lắc tuân theo tín hiệu bạn đã chỉ định ở đầu vào, vì vậy mô hình nghịch đảo là phù hợp nhất.
Khi thiết kế bộ điều khiển rung, hãy chọn một thuật toán phù hợp với ứng dụng quan tâm và điều chỉnh chính xác các đặc tính của bộ lọc thích ứng. Thuật toán phải đáp ứng các tiêu chí sau:
Bộ lọc thích ứng phải có đáp ứng xung dài để tạo ra bộ lọc FIR có tần số cắt mạnh.
Thuật toán phải thích ứng nhanh chóng vì sự thích ứng trong thời gian dài có thể gây hỏng sản phẩm thử nghiệm được gắn trên máy thử rung xóc.
Thuật toán phải ổn định và mạnh mẽ.
Thuật toán phải chịu được nhiễu và nhiễu bên ngoài.
Trong số nhiều thuật toán thích ứng hiện có, họ quan trọng nhất là thuật toán Least Mean Square (LMS ). Thuật toán LMS phổ biến vì tính đơn giản và dễ thực hiện của nó. Do đó, nó được sử dụng trong nhiều ứng dụng xử lý tín hiệu, nơi các yêu cầu tính toán phải được giảm thiểu. Nếu đầu vào và các phản hồi mong muốn của một hệ thống thích ứng có sẵn ở mỗi lần lặp, thì thuật toán này nói chung là lựa chọn tốt nhất cho nhiều ứng dụng xử lý tín hiệu thích ứng khác nhau.
Tuy nhiên, thuật toán này có đặc tính hội tụ chậm, cần phải có một số lượng lớn các lần lặp tốn thời gian trước khi tín hiệu lỗi được chuyển về 0. Điều này làm cho thuật toán LMS trở thành một giải pháp không phù hợp cho máy thử nghiệm rung xóc.
Hầu hết các thuật toán bộ lọc yêu cầu thực hiện một quá trình tích phân để đạt độ chính xác cao, quá trình này xảy ra chậm vì vậy không phù hợp với bộ lọc đáp ứng xung dài cho thử nghiệm rung xóc.
Người ta đã chứng minh được rằng một phép tích phân các chuỗi xác có thể thay thế bằng một phép nhân của các chuỗi giống nhau. Như vậy giảm thiểu độ trễ thời gian đầu vào.
>>> XEM THÊM CÁC SẢN PHẨM THIẾT BỊ THỬ NGHIỆM >>>
Tủ thử nghiệm nhiệt độ, áp suất theo độ cao
Tủ thử nghiệm chống xâm nhập IPx
======================
VintechME - 1Tech Việt Nam là đơn vị chuyên cung cấp các giải pháp kỹ thuật toàn diện bao gồm trang thiết bị và các gói dịch vụ liên quan đến thử nghiệm, đo lường.
Hotline (Zalo/ Whatsaap): 0966 252 565/ 0979 388 908/ 0972 317 221
Email: info@vintechme.com
Fanpage: https://www.facebook.com/vintechme
Website: https://vintechme.com/
Địa chỉ: Số 197, đường Thụy Phương, Bắc Từ Liêm, Hà Nội, Việt Nam.
 Tiếng Việt
Tiếng Việt English
English